







郭先生
181 2433 8518
在工业自动化领域,多轴联动技术广泛应用于数控机床、机器人等设备中,但多轴之间的协同控制常面临“打架”问题,即各轴运动不协调导致误差甚至设备损坏。限位开关作为关键安全组件,其协同控制对保障多轴系统稳定运行至关重要。
限位开关协同控制的核心在于实时监测与反馈。以数控龙门铣镗床为例,其X轴采用双电动机双边驱动,两侧安装HEIDENHAIN精密光栅尺,位置信号反馈至数控系统,形成同步轴对。当某轴接近极限位置时,限位开关触发信号,系统立即调整其他轴运动,避免碰撞。
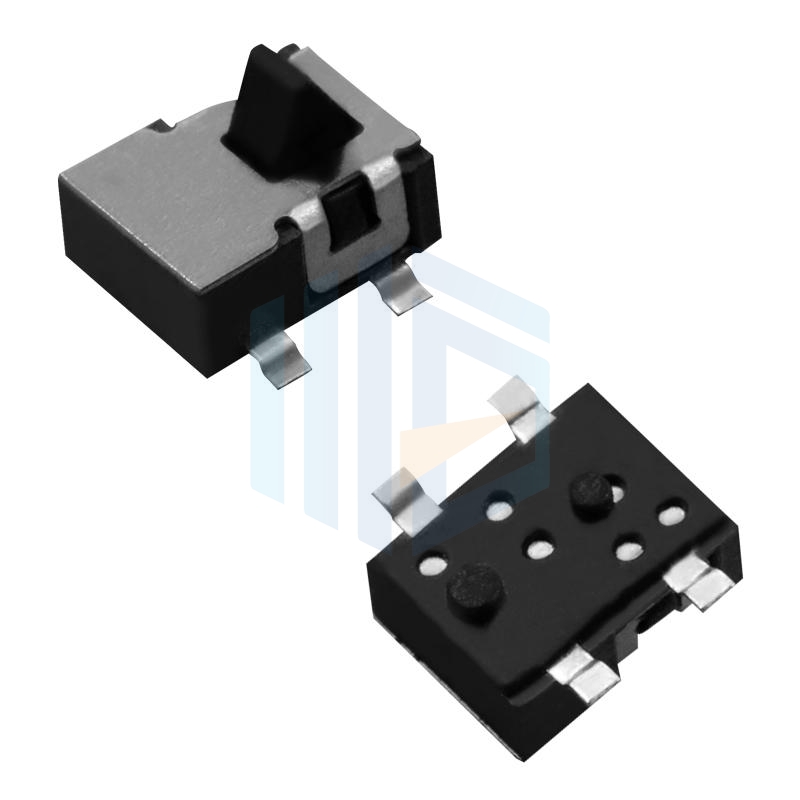
实现协同控制需硬件与算法协同。硬件层面,需选用高精度限位开关,如直流三线式、NPN型限位开关,通过I/O接口卡与控制卡相连,确保信号传输稳定。软件层面,采用PID控制算法或自适应控制算法,根据限位开关反馈实时调整控制参数。例如,在五轴联动数控机床中,采用自适应控制算法,实时调整控制参数,轨迹跟踪精度提高30%,振动降低50%。
此外,还需考虑机械间隙、热膨胀误差等因素。通过精密的运动学建模与误差补偿策略,可进一步提升协同控制精度。例如,在多轴联动机器人手臂控制中,采用鲁棒控制算法,克服系统不确定性和外部扰动,搬运稳定性提高60%,响应速度提高40%。
限位开关的协同控制是多轴联动稳定运行的关键。通过硬件优化、算法创新及误差补偿,可有效解决多轴“打架”问题,提升设备性能与生产效率。
Copyright © 东莞市恒祺电子科技有限公司 版权所有 网站地图 粤ICP备18066939号