







郭先生
181 2433 8518
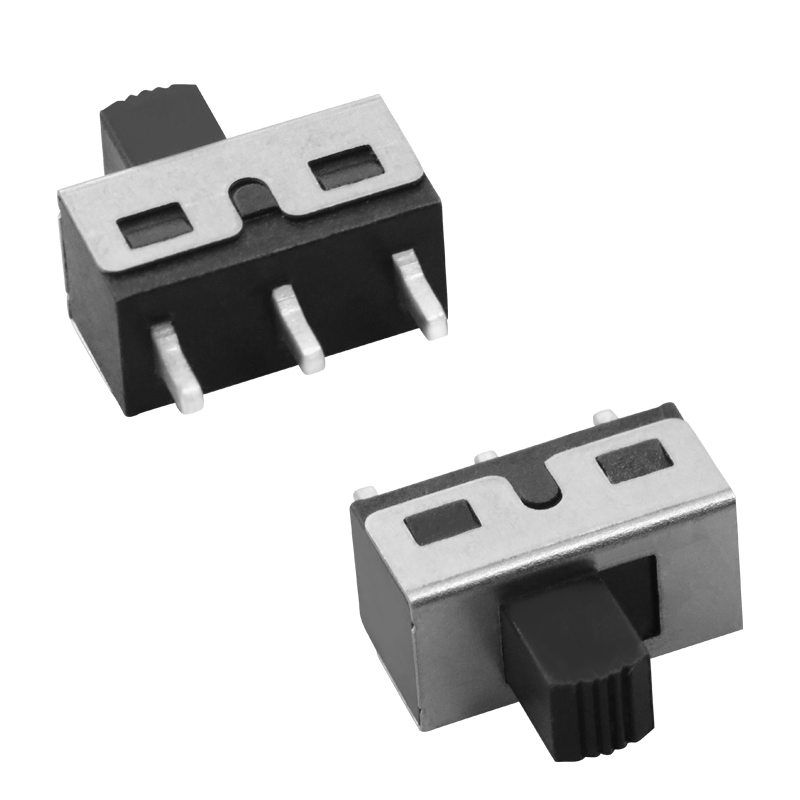
限位开关是工业机器人实现精准运动控制与安全防护的核心元件,广泛应用于机械臂关节、末端执行器及工作空间边界等场景,其性能直接影响机器人的可靠性、效率与安全性。
应用场景:在机械臂关节处,限位开关通过物理触碰或非接触感应(如磁性、光电)实时监测关节转动角度,防止超程运动导致的机械损伤;在末端执行器(如焊钳、夹爪)的开合控制中,限位开关可精确限定操作范围,确保抓取或焊接精度;此外,在机器人工作空间边界设置限位开关,可触发急停信号,避免与周边设备或人员发生碰撞。

技术挑战:一是环境适应性,工业现场的高温、粉尘、油污等易导致限位开关触点氧化或传感器误判,需采用密封设计(如IP67防护等级)与耐腐蚀材料;二是响应速度,高速运动场景下(如3m/s的机械臂),限位开关需具备微秒级响应能力,以避免滞后引发的碰撞;三是寿命与可靠性,高频次操作(如每天数万次)要求限位开关寿命达千万次级,且需通过冗余设计(如双触点结构)降低失效风险。
未来,随着协作机器人与柔性制造的发展,限位开关将向小型化、智能化(集成自诊断功能)方向演进,以适应更复杂的工业场景需求。
Copyright © 东莞市恒祺电子科技有限公司 版权所有 网站地图 粤ICP备18066939号